SoutheastCon Project 2024-2025
The "IEEE Southeast Convention" is an annual convention that is held in various regions within the Southeastern United States. This year the convention was held in Charlotte, North Carolina and featured a hardware competition. The purpose of this competition was to test an engineering team's ability to design, fabricate, and deploy a customized robot to complete goals outlined by the competition committee.
Objective of the competition”s
The scenario of this year competition, called "Mining Mayhem", is set in the year 2047 and challenged teams to design autonomous robots capable of collecting two valuable materials, Geodinium (which contained magnets) and Nebulite (which were hallow inside), from simulated asteroids. Within a three-minute time limit, the robots were tasked with retrieving these astral materials, placing them into designated Cosmic Shipping Containers, and delivering them to a specified Rendezvous Pad. For additional points, teams could also explore a cave-like feature on the game field that offered potential bonus opportunities.



Competition's Rules and Specifications
Each team had to perform given tasks in a three-minute time limit and be judged on performance against other university’s team submissions.
Per the rules of the competition:
-
Maximum Robot Dimensions: 12" x 12" x 12".
-
Appendages may extend beyond this constraint once the match has begun.
-
Maximum Weight: 12 kg (26.5 lbs).
-
Start Button: If utilized, must incorporate a 5-second delay before activation (clearly marked).
-
Emergency Stop Button: Must be included and clearly marked.
-
No hydraulic systems; pneumatic parts must not exceed 100 psi.
-
The robot must operate at 30V or less.
-
Robot must operate autonomously.
-
Wireless communication is permitted between robot components, but not with external devices.
-
The robot must be capable of reading AprilTags.
Beacon Specifications:
-
Dimensions: Minimum 3" x 3" x 6", maximum 6" x 6" x 8".
-
Custom labeling is required.
-
Pole dimensions: 1" diameter, 1.25" long to fit beacon hole.
-
Time Limit: All functions must cease after 3 minutes.
Figure 1: Game Field

Field components
-
Field - Physical Robot game-playing area that consists of border walls and everything inside of them.
-
34 Astral Materials - Items to be collected. Astral Materials come in two varieties: Geodinium (magnetic and heavier) and Nebulite (purely 3D printed plastic).
-
Geodinium - a 40 mm, 3-D printed object that contains magnets to simulate a magnetic material.
-
Nebulite – A 40-mm, 3-D printed material of the same model and size of Geodinium without containing magnets
-
-
2 Cosmic Shipping Container (CSC) - A clear plastic box. These Game Elements can be scored in Rendezvous Pads and are a scoring location for Astral Materials.
-
Rendezvous Pad - A scoring Area on the west side of the Field designated by tape that is a potential scoring location for Cosmic Shipping Containers.
-
Start LED - This LED is illuminated to indicate the start of the Match.
-
AprilTag - A visual fiducial system, useful for a wide variety of tasks including augmented reality, robotics, and camera calibration.
-
Beacon - A Team Game Element that can be placed into the Beacon Mast in order to score points.
-
Cave - Area of the Field that will be mostly closed off and much darker than the rest of the field.
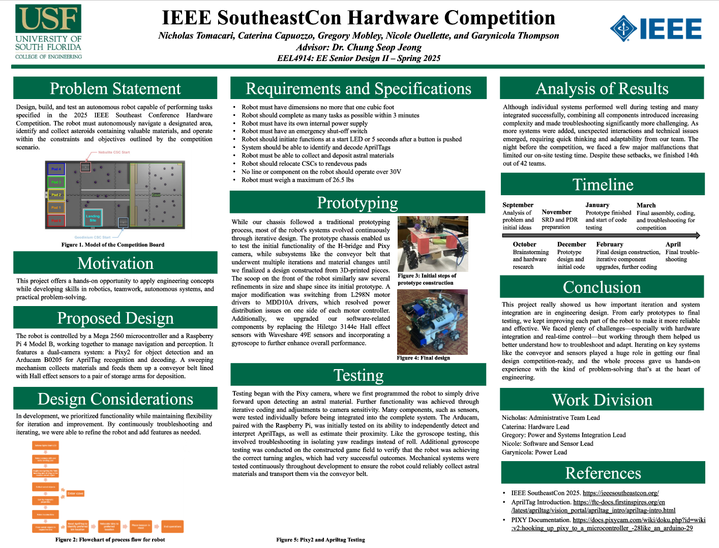
Proposed Design
The proposed design for this competition has had multiple iterations to the approach of the competition.
Overview:
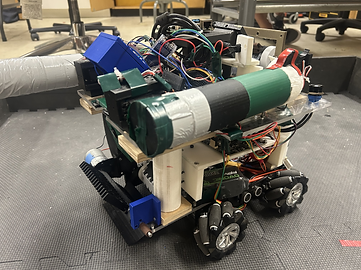
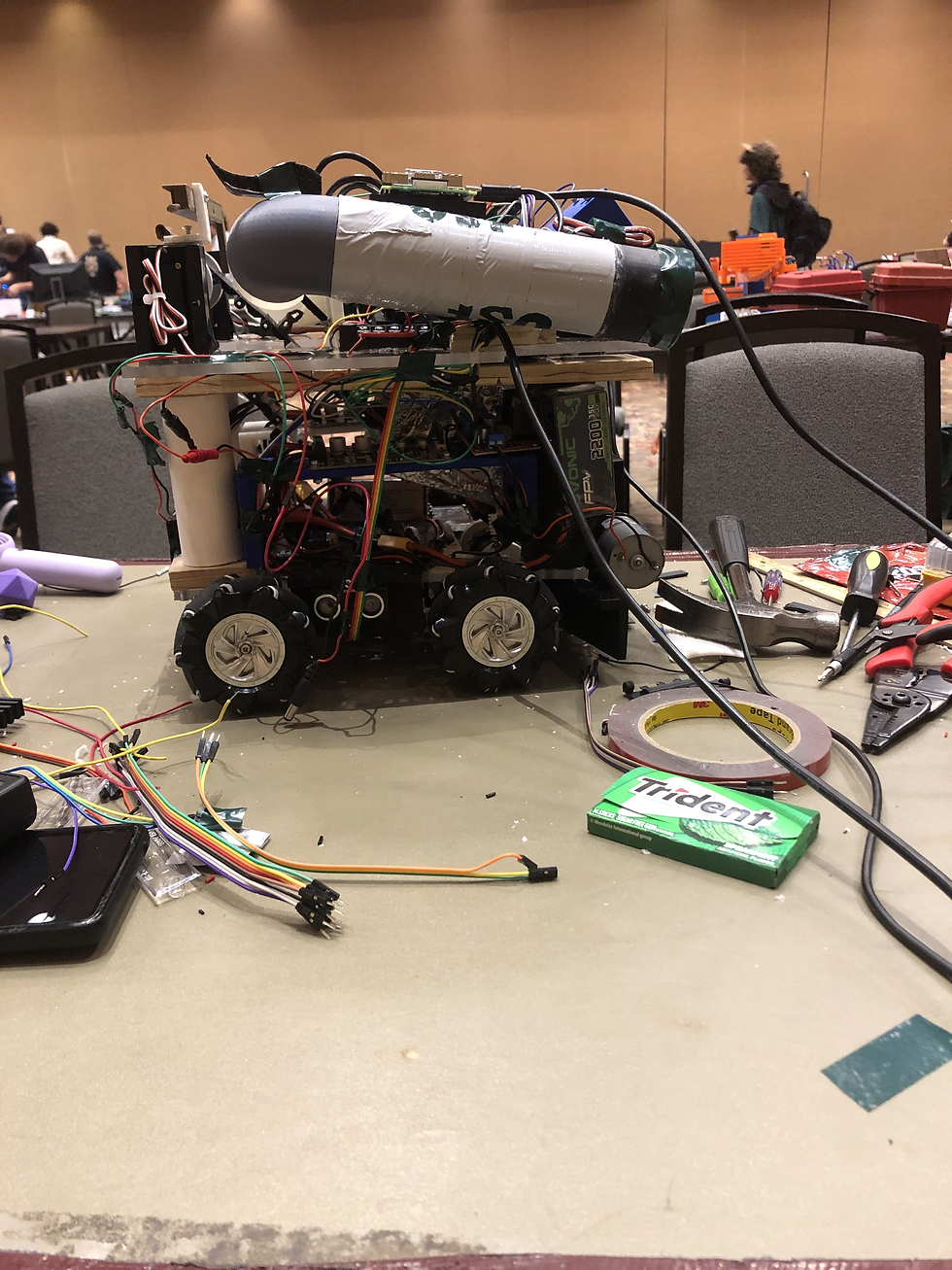
The journey to completing our robot, whom we named Timmi (Technologically Integrated Material Managment Inspector), was filled with challenges and growth. The project was assigned in October, and we spent most of the Design 1 semester gathering materials, sourcing hardware, and finalizing the design. In January, we began building the robot, and much of March was dedicated to testing and fine-tuning the components to ensure all competition requirements were met.
Our robot, Timmi, was designed and built to collect, identify, and sort astral materials within a limited time. The robot uses a combination of mechanical and vision-based systems to navigate the field, locate objects, and perform sorting tasks with precision and efficiency.
Equipped with a sweeping propeller, ramp, and magnetic conveyor belt, Timmi collects materials and delivers them to designated bins based on magnetic properties. Dual camera systems—the Pixy2 and ArduCam—enable object and AprilTag recognition, allowing for intelligent decision-making and accurate navigation.
Powered by an Arduino MEGA 2560 and a Raspberry Pi working in tandem, Timmi brings together hardware and smart vision processing. The entire system was carefully prototyped, 3D-printed, and optimized to stay within strict size, weight, and time constraints.





















Analysis of Results and Outcome
Although individual systems performed well during testing and many integrated successfully, combining all components introduced increasing complexity and made troubleshooting significantly more challenging. As more systems were added, unexpected interactions and technical issues emerged, requiring quick thinking and adaptability from our team.
The night before the competition while we were about to do a last test run a couple of unexpected issues rose up, things that had worked up until now started to have some issues, like the conveyor belt and the motor of the propeller. Despite this setback, our team remained determined to find a solution, so we spent the night solving those issue and we were able to get the robot ready to compete the next morning.
Despite the challenges encountered, our team demonstrated resilience and determination throughout the competition.
Out of 42 competitors, we secured the 14th position. Despite the challenges of the competition, we take pride in our ability to adapt and compete under pressure.
Following the competition, we conducted a thorough assessment of our robot's performance, identifying areas for improvement.
We are committed to learning from our mistakes and making necessary adjustments to enhance our robot's structure and functionality.
Desing 1 and Desing2 content
Design1 link to folder:
https://drive.google.com/drive/folders/1dfVPTENjHBw3OGUyv6cv1IMIjNI3HjW9?usp=drive_link
Design2 link to folder:
https://drive.google.com/drive/folders/12yb_HKL5U2_UqbTjDsZbXc1uyazviNf-?usp=drive_link
Watch Our Final Iteration:
View the video demonstration showcasing the last iteration of our robot, capturing the culmination of our efforts and innovations.
Team 2023/2024





Poster